
Sistema de inyección multipulso
El combustible se suministra mediante hasta cuatro pulsos: dos piloto, uno principal y uno posterior. La masa de combustible se calcula como se describe en la siguiente sección, donde la masa total de combustible se puede dividir entre los pulsos piloto y principal.
Los pulsos posteriores se calculan por separado de otros pulsos. No se consideran en términos de entrega de torque en un motor, sino más bien como tratamiento de escape o estrategias de control del turbo que tienen un efecto limitado en el torque general del motor.
Sistema de pulso principal
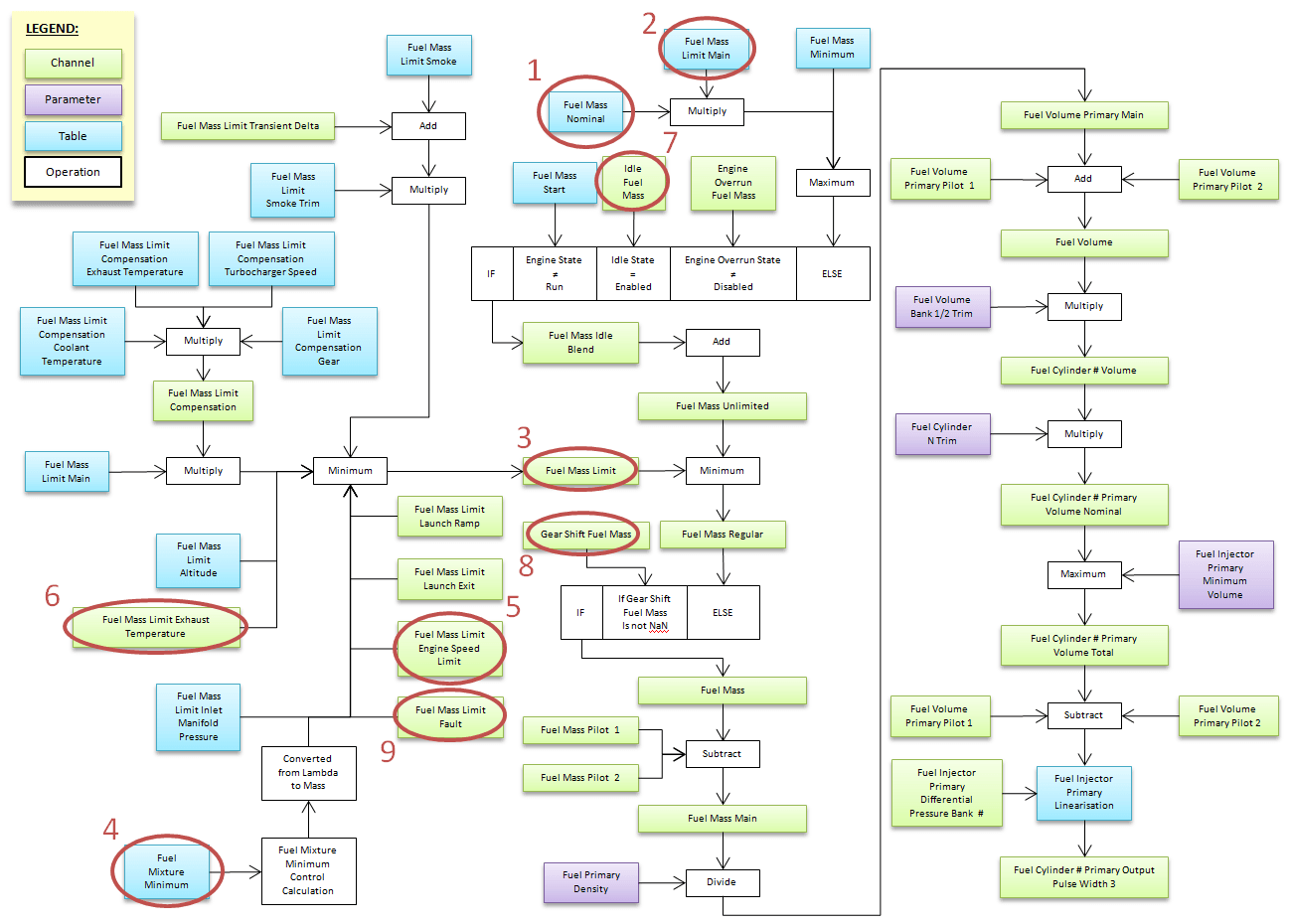
Aviso: Esta sección hace referencia al diagrama de flujo del pulso de inyección principal en la página siguiente (Fig. 1).
- Este paquete suministra combustible en proporción a la posición del pedal del acelerador (ver 1 y 2 en la Fig. 1, página 1). La masa de combustible puede entonces limitarse (ver 3 en la Fig. 1) mediante una serie de tablas y cálculos, que incluyen:
- Límite de masa de combustible Humo
- Límite de masa de combustible Recorte de humo
- Compensación del límite de masa de combustible Temperatura del refrigerante
- Compensación del límite de masa de combustible Temperatura de escape
- Compensación del límite de masa de combustible Velocidad del turbocompresor
- Engranaje de compensación del límite de masa de combustible
- Altitud límite de masa de combustible
- Límite de masa de combustible de temperatura de escape
- Falla del límite de masa de combustible
- Límite de masa de combustible Presión del colector de admisión
- Mezcla mínima de combustible
- El sistema de control de mezcla mínima de combustible aplica un ajuste al límite de masa de combustible para garantizar que la Lambda de escape no sea más rica que el límite definido por el usuario, que se establece en la tabla de mezcla mínima de combustible (ver 4 en la Fig. 1).
- El sistema de control de limitación de velocidad del motor varía la masa de combustible para mantener la velocidad del motor dentro de los límites definidos por el usuario (ver 5 en la Fig. 1).
- Protección de la temperatura de escape El sistema de control que limita la masa de combustible (ver 6 en la Fig. 1) en función de la temperatura de escape se puede utilizar para evitar el sobrecalentamiento de los componentes de escape (es decir, el turbocompresor).
- Control de velocidad de ralentí con control de masa de combustible de circuito cerrado (ver 7 en la figura 1) para garantizar una velocidad de ralentí del motor suave y estable. La función de desaceleración también se puede utilizar para proporcionar una transición suave al modo inactivo.
- Cambios de marcha asistidos con control independiente de la masa de combustible (ver 8 en la Fig. 1). Los cambios ascendentes y descendentes se pueden ajustar de forma independiente a través de tablas separadas.
- Control configurable de hasta 2 bombas de combustible de inyección directa proporcionales y 1 síncrona.
- Se pueden establecer límites de masa de combustible (ver 9 en la figura 1) para cada una de las 61 advertencias individuales que se pueden monitorear con el sistema de advertencia. El sistema de advertencia determina si una medición está fuera de las condiciones normales de funcionamiento o si un sensor, entrada o salida está defectuoso.
Se incluyen avisos para:
- Presión de aceite del motor
- Presión del cárter del motor
- Bancos 1 y 2 de presión primaria de combustible directo
- Presión de combustible primario
- Temperatura del refrigerante
- Temperatura del aire de entrada
- Temperatura del aceite del motor
- Lambda de escape
- Temperatura de escape
- Presión de escape
- Velocidad del motor
Fig. 1: Diagrama de flujo del pulso de inyección principal
Sistema de pulso piloto
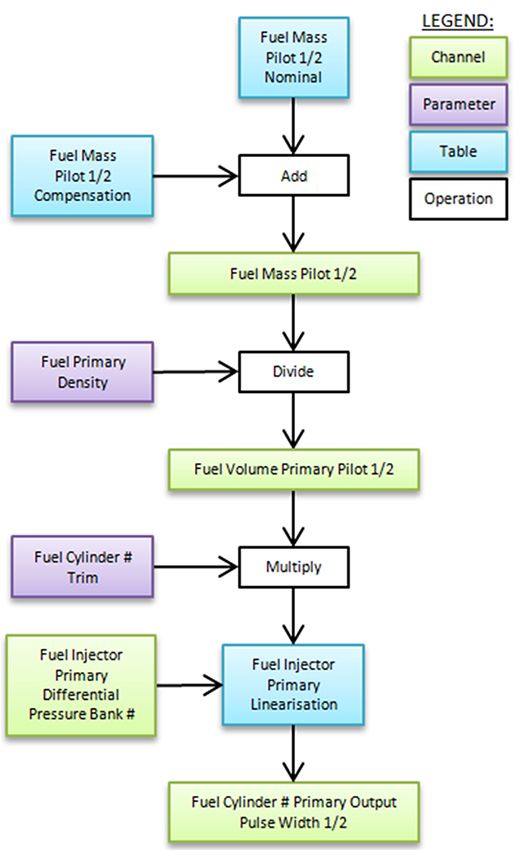
Admite hasta dos pulsos piloto antes del pulso principal para permitir un funcionamiento más suave y reducir el ruido. La masa de combustible de cada pulso piloto puede variar con la velocidad del motor y la masa total de combustible que se entrega. La masa de combustible piloto también se puede compensar según la temperatura del refrigerante. La sincronización del pulso piloto puede ser relativa al TDC, al pulso principal o calculada. El tiempo también se puede variar con la velocidad del motor y la masa total de combustible y se puede compensar según la temperatura del refrigerante y la carga del motor.
Fig. 2: Diagrama de flujo del pulso de inyección piloto
Sistema post-pulso
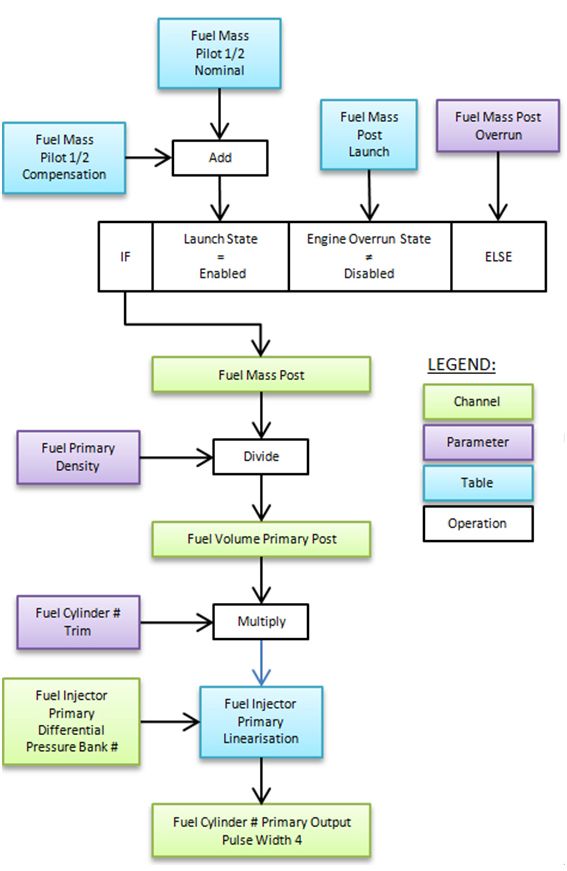
Se puede agregar un solo pulso posterior después del pulso principal para reducir las emisiones o aumentar el empuje sin afectar la potencia del motor. La masa de combustible posterior al pulso puede variar con la velocidad del motor y la masa total de combustible que se entrega. La masa de combustible piloto también se puede compensar según la temperatura del refrigerante.
El tiempo posterior al pulso puede ser relativo al TDC, al pulso principal o calculado. La sincronización también se puede variar con la velocidad del motor y la masa total de combustible y se puede compensar con la temperatura del refrigerante. El postpulso se puede controlar de forma independiente durante el arranque y la marcha del motor, con opciones para deshabilitar/habilitar el postpulso durante los cambios de marcha y el control de tracción.
Fig. 3: Diagrama de flujo del pulso posterior a la inyección
Motores OE conocidos que son adecuados:
| Familia de motores | Designación del motor | Año | Plataforma de vehículos | Unidad de control electrónico | Comentario |
|---|---|---|---|---|---|
| Toyota KD | 1KD-FTV | 2012-2015 | Hilux KUN16R, KUN26R | M130 o M150*, M141 o M142 | Inyectores inductivos de media tensión |
| Toyota GD | 1GD-FTV | 2015-2018 | Hilux GUN126R | M141 o M142 | Inyectores inductivos de media tensión |
| Autocaravana Toyota | 1VD-FTV | 2007-2017 | Landcruiser 200 | M130 o M150*, M141 | Inyectores inductivos de alto voltaje |
| Duratorq 3.2 | Puma ZSD (P5AT) | 2011-2018 | Ford Ranger T6 | M141 | Inyectores piezoeléctricos |
| Duratorq 3.2 | MZ-CD3.2 | 2011-2018 | Mazda BT50 | M141 | Inyectores piezoeléctricos |
| Mitsubishi 4N1 | 4N15 | 2015-2018 | Mitsubishi Tritón L200MQ | M141 | Inyectores inductivos de alto voltaje |
| Isuzu J | 4JJ1-TCX | 2012-2018 | Isuzu D-Max | M141 o M142 | Inyectores inductivos de media tensión |
| GM Duramax | LWN | 2012-2018 | Holden Colorado | M142 | Inyectores inductivos de media tensión y alta corriente |
| Motores VM | R-4028 DOHC | 2010-2018 | Jeep Wrangler | M142 | Inyectores inductivos de media tensión y alta corriente |
*Las ECU M130 y M150 solo se pueden utilizar junto con la caja de accionamiento del inyector OE.